Innovación
Investigadores y becarios de la FICH fueron premiados en un concurso de diseño y desarrollo de robots
Pertenecen al Instituto de Investigación en Señales, Sistemas e Inteligencia Computacional de UNL-CONICET. Presentaron el diseño preliminar de un robot terrestre compacto en el Concurso federal de propuestas para la innovación tecnológica «Diseño y desarrollo de robots para aplicaciones productivas y de servicios».
Los investigadores Guido Sánchez, Marina Murillo y Leonardo Giovanini; Nahuel Deniz y Exequiel Benavidez, becarios posdoctoral y doctoral -respectivamente-, y Agustín Capovilla, cientibecario, obtuvieron un premio en el Concurso federal de propuestas para la innovación tecnológica «Diseño y desarrollo de robots para aplicaciones productivas y de servicios» con la presentación del diseño preliminar de un robot terrestre compacto. Los ganadores pertenecen al Instituto de Investigación en Señales, Sistemas e Inteligencia Computacional de UNL-CONICET, con sede en la Facultad de Ingeniería y Ciencias Hídricas (FICH), y parte del equipo desarrolla tareas docentes en la Tecnicatura en Automatización y Robótica, carrera de la FICH que se dicta en la sede Rafaela-Sunchales de la Universidad.
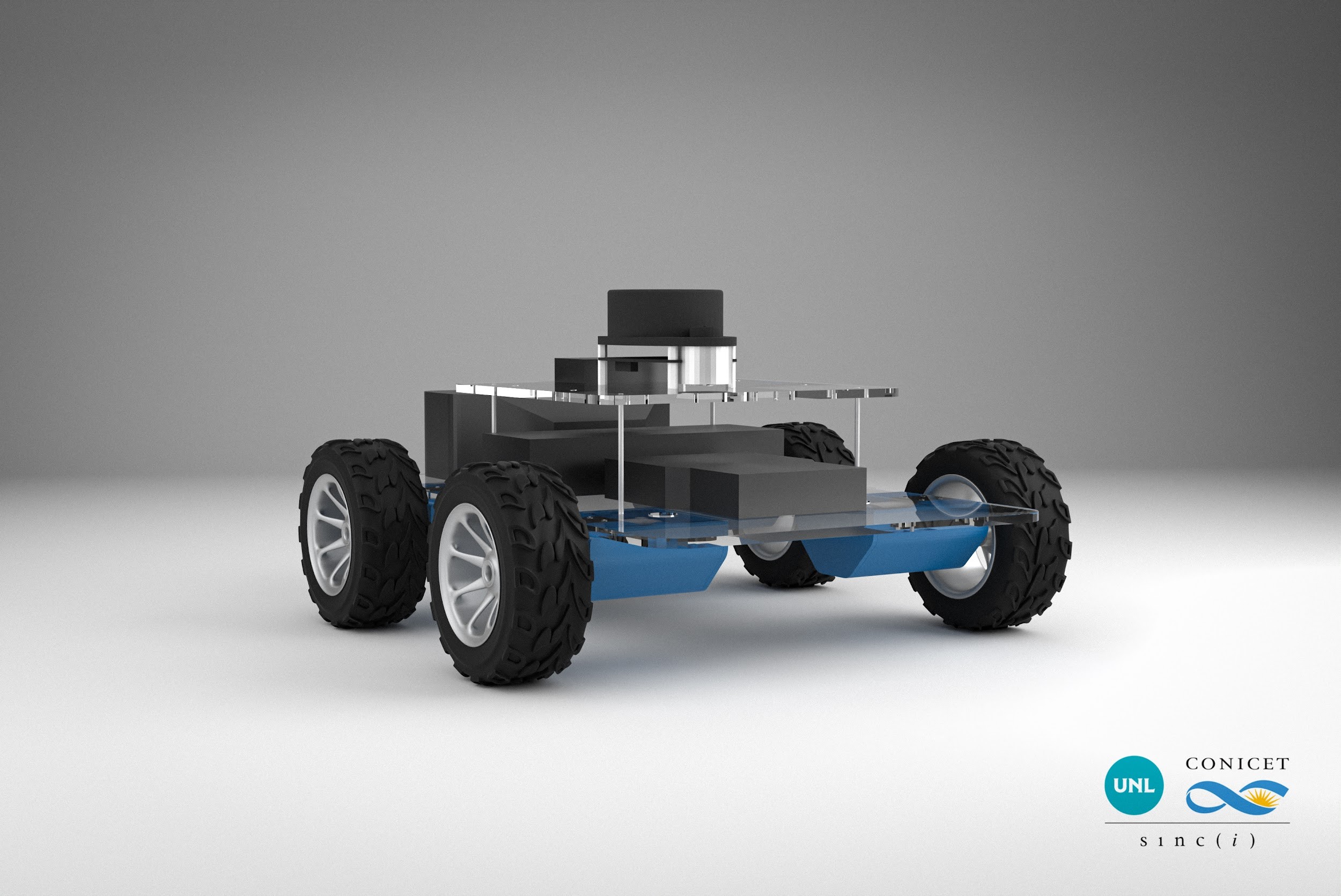
Atendiendo al objetivo principal del concurso, que es promover el desarrollo de robots de industria nacional y de bajo costo, la propuesta ganadora –junto a otras presentadas en la Categoría 2: Diseño preliminar– consistió en una plataforma robótica, de diseño modular y personalizable, cuyo chasis está formado por una plancha de acrílico de 400 x 250 x 5 mm, al cual se le incorporaron cuatro motores independientes, confiriéndole una gran maniobrabilidad en espacios reducidos.
Además, la plataforma consta de una arquitectura distribuida de sensoramiento y control, compuesta por una computadora de una sola placa, un microcontrolador y un módulo de comunicación inalámbrica, conectados a través de un bus serie universal de alta velocidad, que es operado por un software desarrollado por el grupo de trabajo basado en el framework Robot Operating System (ROS). El robot incluye una unidad inercial de medición con magnetómetro, un receptor GPS y un encoder incremental por cada motor.
Prototipo innovador
Los creadores del robot aseguraron que el prototipo propuesto es innovador en dos aspectos: “no existe en el mercado un producto nacional similar, capaz de operar en ambientes interiores y exteriores, y es una plataforma robótica abierta basada en ROS, lo cual facilita el desarrollo e implementación de algoritmos para la navegación y guiado de vehículos. Al estar basado en software y hardware abierto, cualquier usuario capacitado puede realizar las modificaciones que considere necesarias”.
El desarrollo e implementación de sistemas robóticos móviles se ha convertido en un área de mucho interés para la industria y la academia debido a su potencial para transportar y realizar tareas que mejoran el desempeño y la rentabilidad de las actividades, reduciendo los costos y riesgos, aumentando la productividad y mejorando la seguridad de los operarios.
En este sentido, refiriéndose a las aplicaciones de la plataforma robótica diseñada, sus creadores comentaron: “la sinergia entre hardware y software permite que un público de amplio espectro pueda hacer uso de nuestra plataforma robótica para un sinfín de aplicaciones, como por ejemplo navegación autónoma, realización de mapas, evasión de obstáculos, planeamiento de trayectorias, localización y realización de mapas en simultáneo (SLAM), entre otras”.
Otras noticias
Se encuentra a disposición de los docentes investigadores la Planilla de Solicitud de Incentivos para actividades correspondientes al 2021. ver más
Para desarrollar tareas en la Subsecretaria de contrataciones y Gestión de Bienes del Ministerio de Economía. Destinada a estudiantes de Ingeniería en Agrimensura. Inscripción hasta el 9 de diciembre.. ver más
Convocatorias disponibles para desarrollar becas Estímulo a las Vocaciones Científicas del Consejo Interuniversitario Nacional. Postulaciones hasta el 25 de noviembre. ver más
Inscripción de aspirantes para la designación interina en el cargo vacante de Jefe de Trabajos Prácticos, dedicación simple, para las asignaturas Tecnologías de la Programación y Programación de dispositivos móviles de la carrera Ingeniería en Informática ver más